

I'm a research scientist at NVIDIA interested in appearance modeling, light transport
algorithms, and differentiable physically based rendering.
I obtained my PhD from EPFL's Realistic Graphics Lab where I was supervised by Wenzel Jakob. Before that, I completed my Master's degree at ETH Zurich with a focus on visual computing.
I obtained my PhD from EPFL's Realistic Graphics Lab where I was supervised by Wenzel Jakob. Before that, I completed my Master's degree at ETH Zurich with a focus on visual computing.
Publications
-

Microfacet theory for non-uniform heightfields
Eugene d'Eon, Benedikt Bitterli, Andrea Weidlich, and Tizian ZeltnerProject Page Paper
SIGGRAPH 2023 (Conference Track) -

Practical Multiple-Scattering Sheen Using Linearly Transformed Cosines
Tizian Zeltner, Brent Burley, and Matt Jen-Yuan ChiangProject Page Abstract GitHub
SIGGRAPH 2022 Talk -

Monte Carlo Estimators for Differential Light Transport
Tizian Zeltner, Sébastien Speierer, Iliyan Georgiev, and Wenzel JakobProject Page Paper GitHub
In Transactions on Graphics (Proceedings of SIGGRAPH 2021) -

Slope-Space Integrals for Specular Next Event Estimation
Guillaume Loubet, Tizian Zeltner, Nicolas Holzschuch, and Wenzel JakobProject Page Paper
In Transactions on Graphics (Proceedings of SIGGRAPH Asia 2020) -
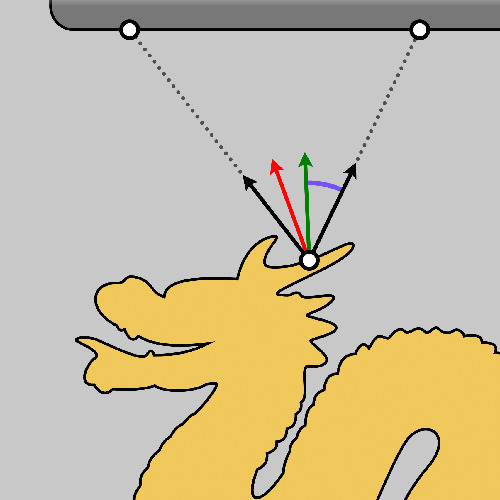
Specular Manifold Sampling for Rendering High-Frequency Caustics and Glints
Tizian Zeltner, Iliyan Georgiev, and Wenzel JakobProject Page Paper GitHub
In Transactions on Graphics (Proceedings of SIGGRAPH 2020) -

Image-Based Acquisition and Modeling of Polarimetric Reflectance
Seung-Hwan Baek, Tizian Zeltner, Hyun Jin Ku, Inseung Hwang, Xin Tong, Wenzel Jakob, and Min H. KimProject Page Paper
In Transactions on Graphics (Proceedings of SIGGRAPH 2020) -

Mitsuba 2: A Retargetable Forward and Inverse Renderer
Merlin Nimier-David, Delio Vicini, Tizian Zeltner, and Wenzel JakobProject Page Paper GitHub
In Transactions on Graphics (Proceedings of SIGGRAPH Asia 2019) -

The Layer Laboratory: A Calculus for Additive and Subtractive Composition of Anisotropic Surface Reflectance
Tizian Zeltner and Wenzel JakobProject Page Paper GitHub
In Transactions on Graphics (Proceedings of SIGGRAPH 2018)
PhD Thesis
-

Light Path Gradients for Forward and Inverse Rendering
Tizian Zeltner, advised by Wenzel JakobProject Page Thesis
École Polytechnique Fédérale de Lausanne, Dec. 2021
Other Projects
-
An Overview of Polarized Rendering
A detailed document summarizing the mathematical framework used for polarized light transport and its implementation in the Mitsuba 3 renderer.Project Page -
2D Specular Manifold Visualizer
A 2D implementation of some light transport algorithms using the specular manifold constraint framework. This can either be used to prototype new ideas or generate animated visualizations.GitHub -

tonemapper
A small application to compare and apply various global tone mapping operators to high-dynamic-range images. It features an interactive preview and a simple GUI to tweak different parameters.GitHub -
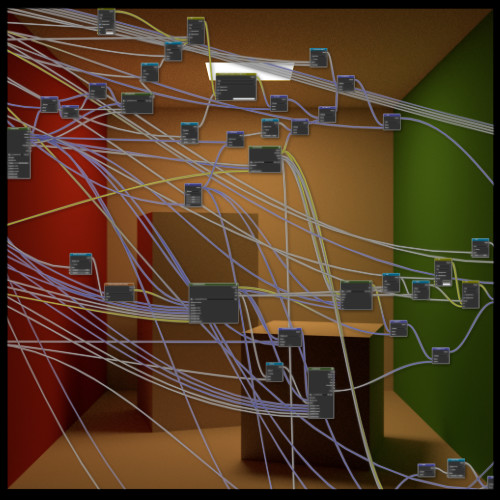
Noodles: A Path Tracer Made of Blender Nodes
A small path tracer built fully inside Blender's shader node editor. Based on a silly joke idea that got way out of hand.Project Page -

-

The Music of Middle-earth
An unofficial companion app to index Howard Shore's music for the 'Lord of the Rings' films.Project Page
The film score consists of more than 80 leitmotifs or themes that relate to specific characters, locations or cultures of Middle-earth. This project tries to provide an interactive listening experience that highlights all theme occurrences throughout the soundtrack in form of a simple, user-friendly application.
Study Projects
-
Light Stippling and Halftoning
Master ThesisProject Page
ETH Zurich, Aug. 2016
A method for the design of perforated surfaces that project grayscale shadow images onto nearby walls when illuminated by a light source. -

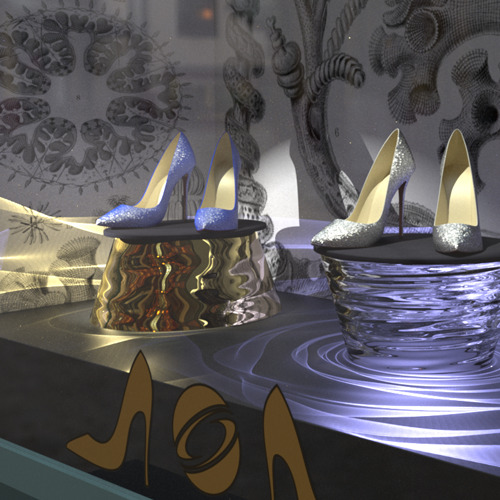
Image Synthesis
Course Project ETH Zurich, Spring Semester 2015Project Page Image Course Website
Implementation of various features in a physically-based renderer. The image created for the final project won 1st place at the ETH Rendering Competition 2015.
Built using the Nori framework. -

Physically-based Simulation
Course Project ETH Zurich, Fall Semester 2014GitHub YouTube Course Website
A real-time Spinning Top Simulation built for the yearly competition held in this course, in collaboration with Milan Bombsch. The main challenges were to implement rigid-body dynamics and collision detection between complex geometry. -

An AR Framework for City-Wide Treasure Hunting
Bachelor ThesisProject Page GitHub
ETH Zurich, Sept. 2014
A framework to design and build city-wide Augmented Reality scavenger hunt games together with an implementation of an example game for mobile devices.
{kind=link}